


















Autor: Michał Lach
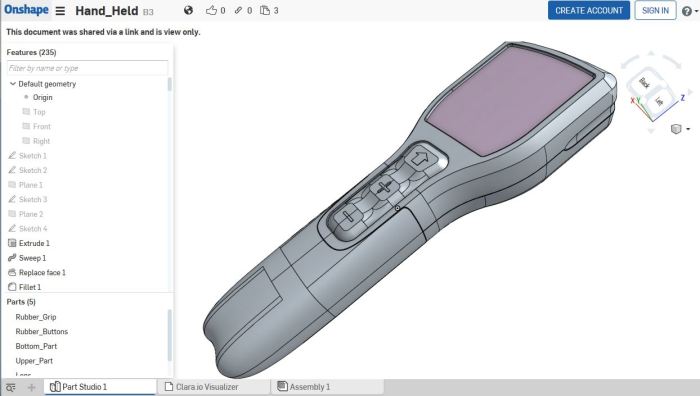
Czytelnicy niniejszego bloga mogli ostatnio zwrócić uwagę na pojawiające się razem z artykułami linki do modeli 3D, wykonanych w systemie w Onshape. Środowisko to, ma jedną główną zaletę, będąc zaprojektowanym do działania w „chmurze, jest to CAD, niejako niezależny od sprzętu i systemu operacyjnego. Dodatkowo Onshape pozwala na udostępnianie projektów użytkownikom w trybie „gościa”, bez konieczności logowania, czy zakładania konta przez nich właśnie. Stąd, każdy czytelnik niniejszego bloga, w każdej chwili, może otworzyć projekt, zobaczyć na przykład, jak jest skonstruowane drzewo modelu, a po skopiowaniu samemu rozpocząć pracę nad modelem. Czyni to środowisko Onshape idealnym aby móc w prosty, darmowy i LEGALNY sposób, „ilustrować” zagadnienia projektowe/wzornicze podejmowane przez Jacka. Ostatni taki przypadek, to model 3D urządzenia przenośnego Hand_Held
Okazał się na tyle interesującym tematem że zmotywował mnie (ale także Jacka) do głębszego przetestowania możliwości modelowania powierzchniowego środowiska Onshape. Rezultatem tego wysiłku ma być cykl artykułów przedstawiających czytelnikom podstawowe zagadnienia modelowania powierzchniowego (np. trój lub pięciobrzegowe powierzchnie), realizowane przy wykorzystaniu istniejących narzędzi w Onshape. Niemniej, wpierw warto się pokusić o ogólną ocenę oraz o występujące ograniczenia.
Najnowsze aktualizacje programu Onshape wprowadziły nowe narzędzia do modelowania powierzchniowego, takie jak 3D fit spline (krzywa przez punkty), czy Fill (powierzchnia rozpinana pomiędzy krzywymi). Niestety, mimo ciągłych aktualizacji, Onshape w porównaniu z konkurencyjnymi programami CAD, w kontekście potencjału modelowania powierzchniowego, wciąż odstaje. Nadal wielu niezbędnych funkcjonalności brakuje (np. przeciągniecie po ścieżce z kontrolą orientacji po trajektorii), a te narzędzia, które mamy, mają ograniczone możliwości (np. Fill odmawia „posłuszeństwa”, gdy krzywe brzegowe się krzyżują).
Chcąc zaprezentować niektóre zagadnienia z „powierzchniówki” musimy wykonać szereg operacji które w innych programach CAD były by zbędne, a podejmowane kroki nie są bynajmniej oczywiste. Przykładowe rozwiązania będą uniwersalne w swym principium i do zastosowania w każdym popularnym programie CAD (przynajmniej w modelerach bryłowych). Niemniej jednak czytelnik musi się liczyć z tym że ilustrujące zagadnienie modele będą pełne operacji będących jedynie sposobem na obejście ograniczeń. Te modele w których nie będzie żadnych „obejść” będą z racji ograniczeń przedstawiały najprostsze zastosowanie danej techniki, by sam przykład był zrozumiały bez dygresji.
Głównymi ograniczeniami z jakimi musimy się liczyć w Onshape to:
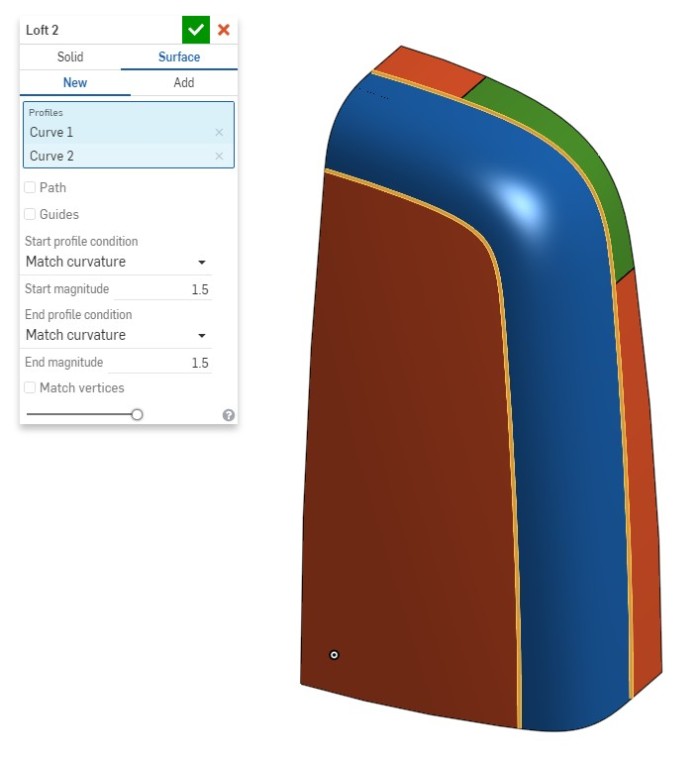
- Brak możliwości zdefiniowania ciągłości geometrycznej powierzchni dla wszystkich krawędzi w narzędziu LOFT.
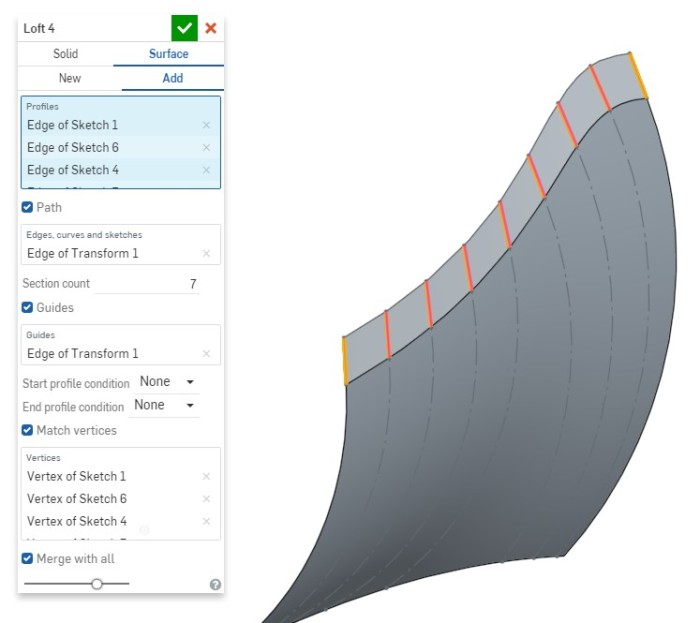
Bieżąca implementacja tego narzędzia pozwala na zdefiniowanie ciągłości jedynie na krańcach będących profilami. Możemy wybrać ścieżki (rails) po których wyciągniemy powierzchnie ale już bez definiowania ciągłości.
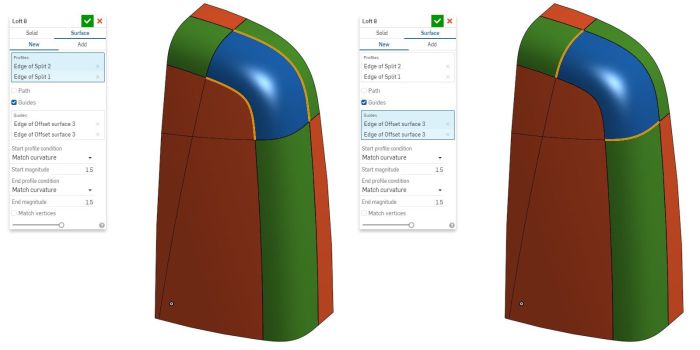
Powyższe przykłady to dość klasyczne zagadnienia w których brakuje nam takiej możliwości i niestety ciągłość w poprzek ścieżek to tylko G0:
Oczywiście to ograniczenie będzie sprawiać kłopoty także w innych przykładach, wspominam te konkretnie bo o ile nie mamy możliwości zdefiniowania ciągłości, to algorytm Loftu będzie „naśladował” krzywiznę sąsiadujących powierzchni i jeżeli tylko topologia modelu będzie właściwa (naturalna) dla danej geometrii, pożądaną ciągłość otrzymamy. Dla modelu maski samochodowej (Hood/Bonnet), wystarczyło zmienić orientację profilu w narzędziu Sweep i dostosować do tego sposób przycinania:
Dla modelu mydelniczki (SoapBox), wystarczyło pozostawić domyślny kształt kolejno powstających powierzchni (w pierwszym przykładzie kształt narożnika jest wymuszony)
Domyślny kształt nie zawsze daje akceptowalne rezultaty, tak to wygląda gdy zmienimy pomysł na maskę samochodową:
Wymuszenie właściwego przebiegu krawędzi, daje dużo lepsze rezultaty:
Popularnym rozwiązaniem jest uniknięcie konieczności definiowania ciągłości po przez zbudowanie przejścia dla całej krawędzi:
2. Brak kontroli nad orientacją profilu wzdłuż ścieżki w narzędziu SWEEP.
To ograniczenie będzie głównie problemem przy technicznych powierzchniach, rzadziej w przypadku projektów wzorniczych. Przy powierzchniach technicznych zazwyczaj potrzebujemy określić kąt obrotu o jaki profil się obróci wzdłuż ścieżki. Często konieczne jest zdefiniowanie profilu jako równoległego/prostopadłego do powierzchni. Popularnym przykładem jest powierzchnia tnąca model na połowy (wtrysk). Przeciągany po ścieżce profil musi pozostać równoległy do wskazanej płaszczyzny.
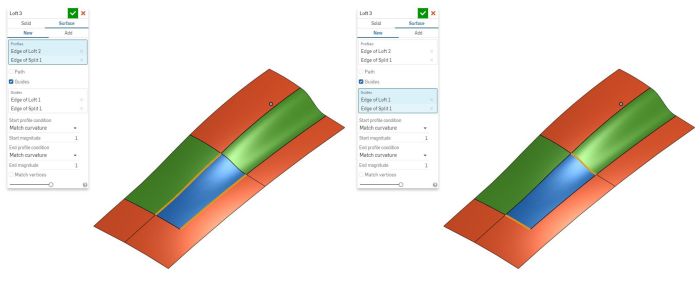
Przykładem wzorniczym jest sytuacja gdzie profil przeciągany jest po krawędzi powierzchni i ma pozostać styczny do tej powierzchni:
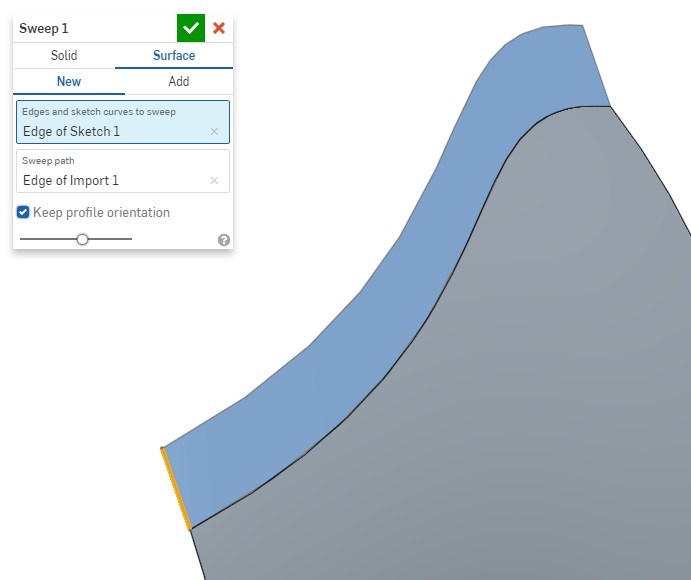
Jest to częsty przypadek kiedy projektant nie jest wstanie zdefiniować a priori kształtu górnej krawędzi i jedynie czym dysponuje to powierzchnia i kształt profilu. W przypadku Onshape jedynym sposobem na obejście tego ograniczenia jest wykorzystanie „dodatkowego Loftu” i zbudowanie przybliżonej powierzchni:
Przybliżenie to mogłoby być dużo lepsze, gdybyśmy tylko mogli dodać styczność do ścieżki (patrz problem opisany wyżej). Oprócz powyższych głównych ograniczeń, mających charakter problemów natury geometrycznej, musimy liczyć się z brakami w interfejsie.
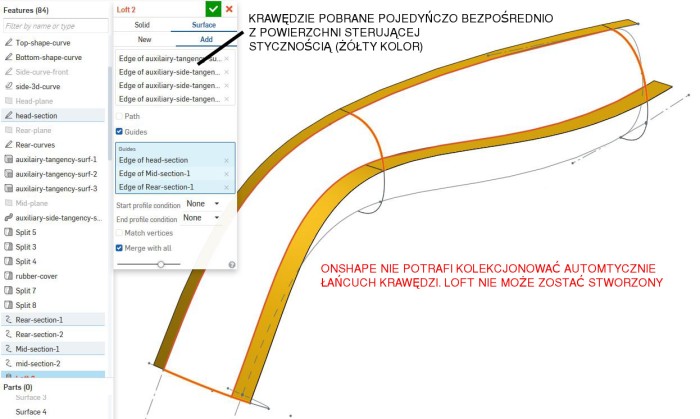
3. Loft i Fill nie potrafią „złapać” łańcucha krzywych
Każda wybrana krawędź/lina/łuk jest widziana jako oddzielny profil, uniemożliwia to wybranie szeregu segmentów jako jednego profilu.
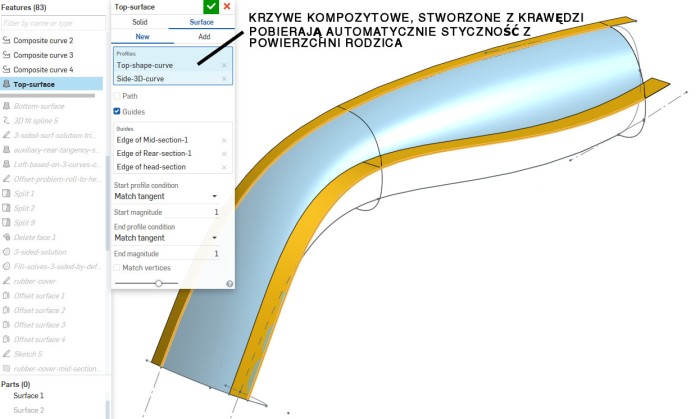
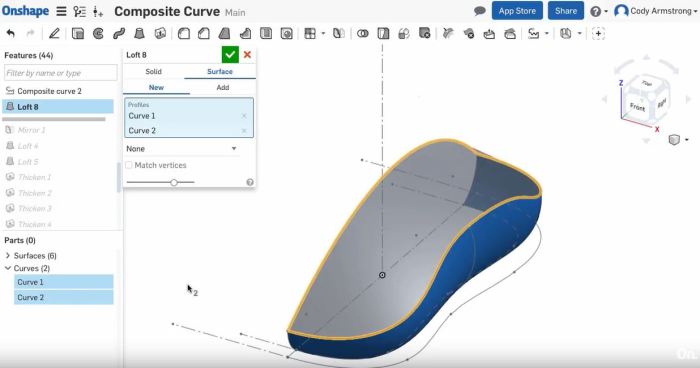
Composite curve, pozwala obejść to ograniczenie. A tworzy się ją tak:
-najpierw należy utworzyć Composite curve z potrzebnych segmentów (tyle CC ile profili potrzebujemy)
– później jeszcze musimy pamiętać aby wybrać CC z list a nie z widoku (jeżeli z widoku to przez menu kontekstowe RMB).
https://www.youtube.com/watch?v=gIwbW4I8P24
4. Problem z krzyżującymi się profilami/krzywymi
Zarówno Loft jak i Fill, wymagają by profil i ścieżka(generalnie wskazywane krzywe/krawędzie) miały punkt wspólny. System nie potrafi lub nie chce domyśleć się i samemu przyciąć tworzoną powierzchnie adekwatnie do wskazanych krzywych(jeżeli krzywe się nie spotykają na swych końcach, powierzchnia nie zostanie przygotowana)
Jeżeli zbudowaliśmy szereg profili na jakiejś ścieżce, to właśnie ta ścieżka musi być wykorzystana do budowy nowej powierzchni, nie kopia (za wyjątkiem composite curve). Nie zawsze jest to problemem, bo związane jest ze stopniem przybliżeń i zaokrągleń w wykorzystywanych algorytmach.
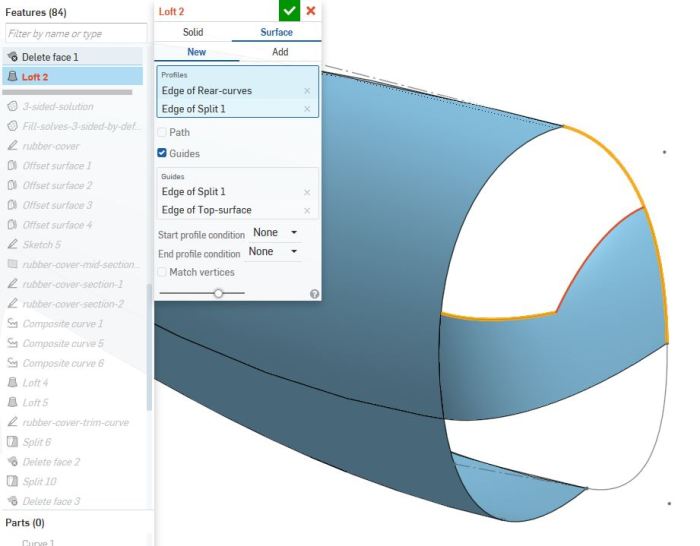
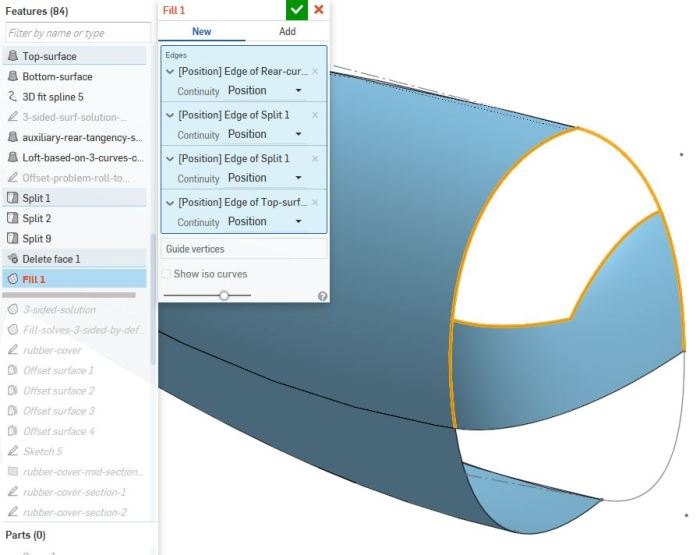
Przykładem może być ostatni Loft w modelu skanera:
vs
Wymienione ograniczenia mają największy wpływ na konieczność stosowania obejść. Myślę że takie wyjaśnienie należy się czytelnikom teraz, by uniknąć zbędnych dygresji w późniejszych artykułach.
O autorze:
Michał Lach na co dzień jest zaawansowanym użytkownikiem środowiska Autodesk Fusion, docenianym i uznanym uczestnikiem właściwego forum
https://forums.autodesk.com/t5/user/viewprofilepage/user-id/2710125
